





Hōʻike
Nā hiʻohiʻona

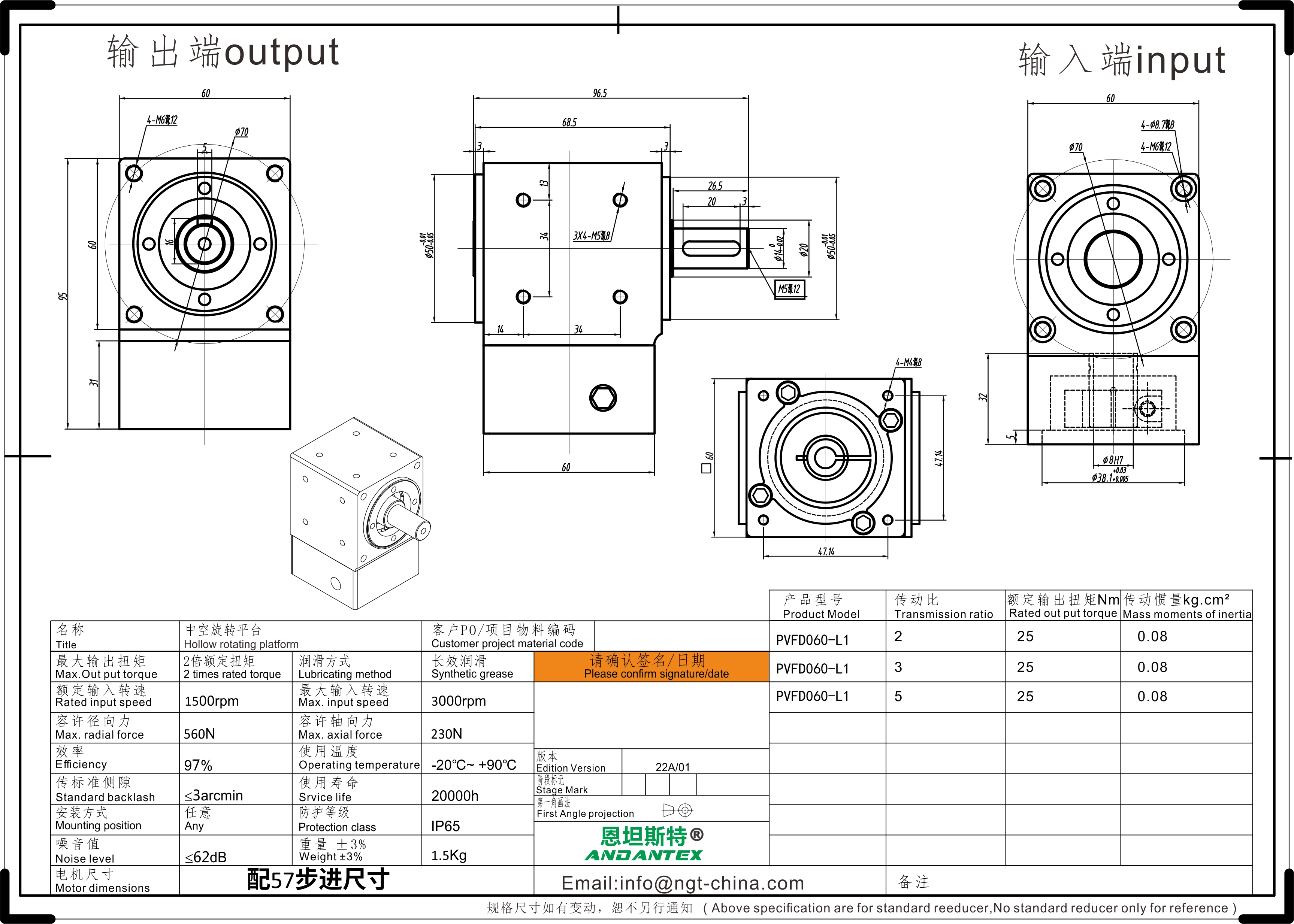
ʻO ka noi ʻana o ka reducer kihi i ka mīkini paʻi pad e hōʻike nui ʻia i nā ʻano aʻe:
Hoʻonohonoho pololei: pono nā mīkini paʻi paʻi e hoʻoneʻe pololei i nā mea paʻi i kahi kūlana i kuhikuhi ʻia, a hiki i nā mea hōʻemi kihi ke hāʻawi i ka mana hoʻololi kiʻekiʻe e hōʻoia i ka pololei i ka wā o ke kaʻina paʻi. Hiki ke ʻike ʻia nā kihi he nui, e hoʻonā i ka pilikia o ka paʻi ʻana i nā huahana anisotropic.
Mālama i ka lewa: Paʻa maʻamau nā pahu pahu kihi i ka hoʻolālā ʻana a kūpono no ka hoʻohana ʻana i loko o nā mīkini paʻi pad kahi i kaupalena ʻia ka wahi, e mālama pono i ka nui o nā lako. ʻAʻole ia e hoʻopilikia i nā hana o nā mea hana mechanical.
Kiʻekiʻe torque output: Hiki i nā pahu pahu kihi ke hāʻawi i ke kiʻekiʻe kiʻekiʻe i kahi kapuaʻi liʻiliʻi, e kūpono iā lākou no nā noi kahi e koi ʻia ai nā ikaika kiʻekiʻe e hoʻokele i ke poʻo paʻi a i ʻole nā mea hana ʻē aʻe. Paʻa loa i ka paʻa ʻana i nā mea me ka ʻole o ka haʻalulu ʻana i ka paʻi ʻana.
Hiki ke hoʻololi: Hiki ke hoʻohana ʻia ka mea hōʻemi kihi me kahi ākea o nā kaʻa a me nā ʻōnaehana hoʻokele e hoʻololi i nā pono o nā ʻano mīkini paʻi pad me ka maʻalahi kiʻekiʻe. ʻAʻole wale me nā kaʻa stepper, akā me nā kaʻa servo brushless motors.
Nā noi

Ma mua o ka hoʻohana ʻia ʻana o nā mea hoʻemi wikiwiki ʻākau, hiki i nā mea paʻi pad ke paʻi i nā huahana ʻaoʻao hoʻokahi. ʻAʻole hiki ke hoʻololi ʻia ke kihi. Hiki ke pa'i 'ia na mea huinaha.
Ma hope o ka hoʻohui ʻana i ka stepper a me ka mea hoʻemi. Hiki ke paʻi ʻia nā mea like ʻole. No ke ʻano o ke ʻano, hiki ke paʻi ʻia, e hoʻonui nui i nā ʻano hana like ʻole o ka mīkini paʻi. Hiki ke hoʻololi i nā mea hana kahiko i mea hana hou. Hoʻohou i ka waiwai o ka automation, hoʻemi i ka hoʻokuʻu kalapona, a lilo i ʻoi aku ka maikaʻi o ke kaiapuni.
Pūʻolo maʻiʻo
1 x pale pulu momi
1 x ka hu'ahu'a kūikawā no ka ha'alulu
1 x pahu pahu kūikawā a pahu lāʻau paha









