




Hōʻike
Nā hiʻohiʻona

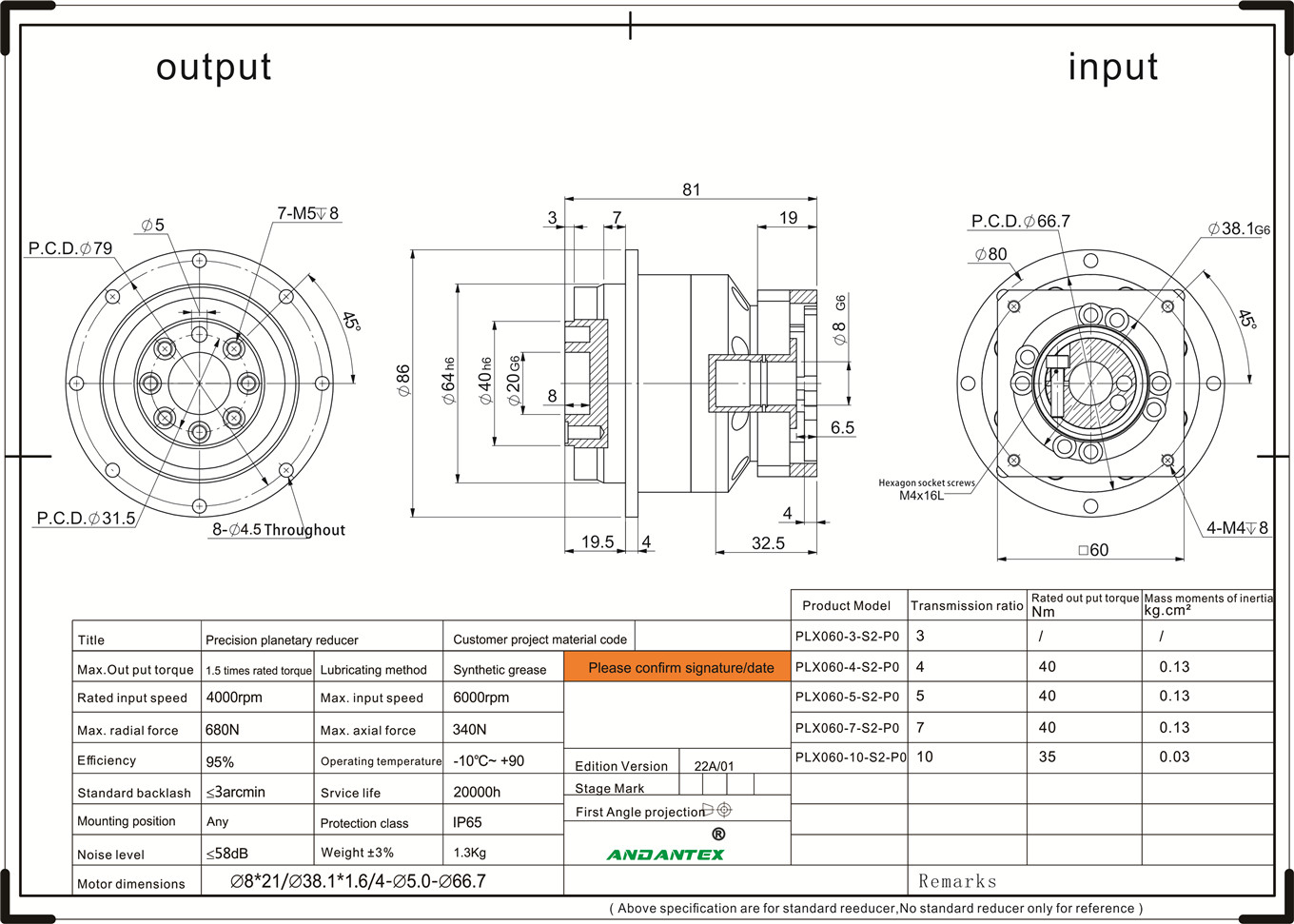
ʻO ka mea hoʻoemi diski kiʻekiʻe he mea mīkini i hoʻolālā pono ʻia e hoʻololi i ka wikiwiki o ka hoʻololi kiʻekiʻe o kahi kaʻa uila i kahi haʻahaʻa haʻahaʻa, kiʻekiʻe-torque output. ʻO kona ʻano kumu he diski a me kahi ʻano o nā mea hana, a ʻo ia ka mea maʻamau e hōʻike ana i nā lakio kikoʻī kiʻekiʻe a me kahi kapuaʻi liʻiliʻi no nā ʻano hana ʻenehana. ʻO ka hoʻolālā ʻana o ka hāmeʻa e hiki ai i ka hoʻoili mana hana kiʻekiʻe ma kahi wahi liʻiliʻi a he ʻāpana nui o nā mīkini a me nā mea hana hou.
Nā noi
I nā mea hana mechanical, ʻaʻole hiki ke hoʻohaʻahaʻa ʻia ka hana o ka mea hoʻemi disk precision kiʻekiʻe. ʻO ka mea mua, he hana koʻikoʻi ia i nā lako automation. Me ka piʻi ʻana o ka hana akamai a me ka ʻenehana 4.0, hoʻohana pinepine ʻia nā laina hana automated i nā ʻano ʻoihana like ʻole. Hāʻawi nā mea hoʻemi disc precision kiʻekiʻe i ka mana o ka neʻe a me ke kūlana no kēia mau mea hana, e hōʻoia ana i ka hana paʻa a me ka hana kiʻekiʻe. No ka laʻana, i nā laina hui automated, hiki i nā pahu pahu ke hoʻonohonoho pono i nā mea kikoʻī, hoʻomaikaʻi i ka hana holoʻokoʻa a me ka kūlike o ka huahana.
ʻO nā robots ʻoihana kekahi wahi noi nui no nā mea hoʻemi disk kiʻekiʻe. Ma nā ʻano hana ʻoihana like ʻole, e like me ka welding, ka lawelawe ʻana a me ka hui ʻana, lilo ka gearhead i mea koʻikoʻi o ka ʻōnaehana neʻe o ka robot ma o ka hoʻololi ʻana i ka wikiwiki kiʻekiʻe o ka mīkini i kahi haʻahaʻa haʻahaʻa, kiʻekiʻe-torque output. Hiki i ka robot ke hana i nā hana paʻakikī me ka pololei a me ke kūpaʻa kiʻekiʻe, a laila e hoʻomaikaʻi ai i ka automation o ke kaʻina hana a me ka maikaʻi o ka huahana. Eia kekahi, ʻo ka hilinaʻi a me ka lōʻihi o ka pahu pahu e hōʻoiaʻiʻo i ka hoʻohana mau ʻana o nā robots ʻoihana, he mea koʻikoʻi ia no ka hana hou.
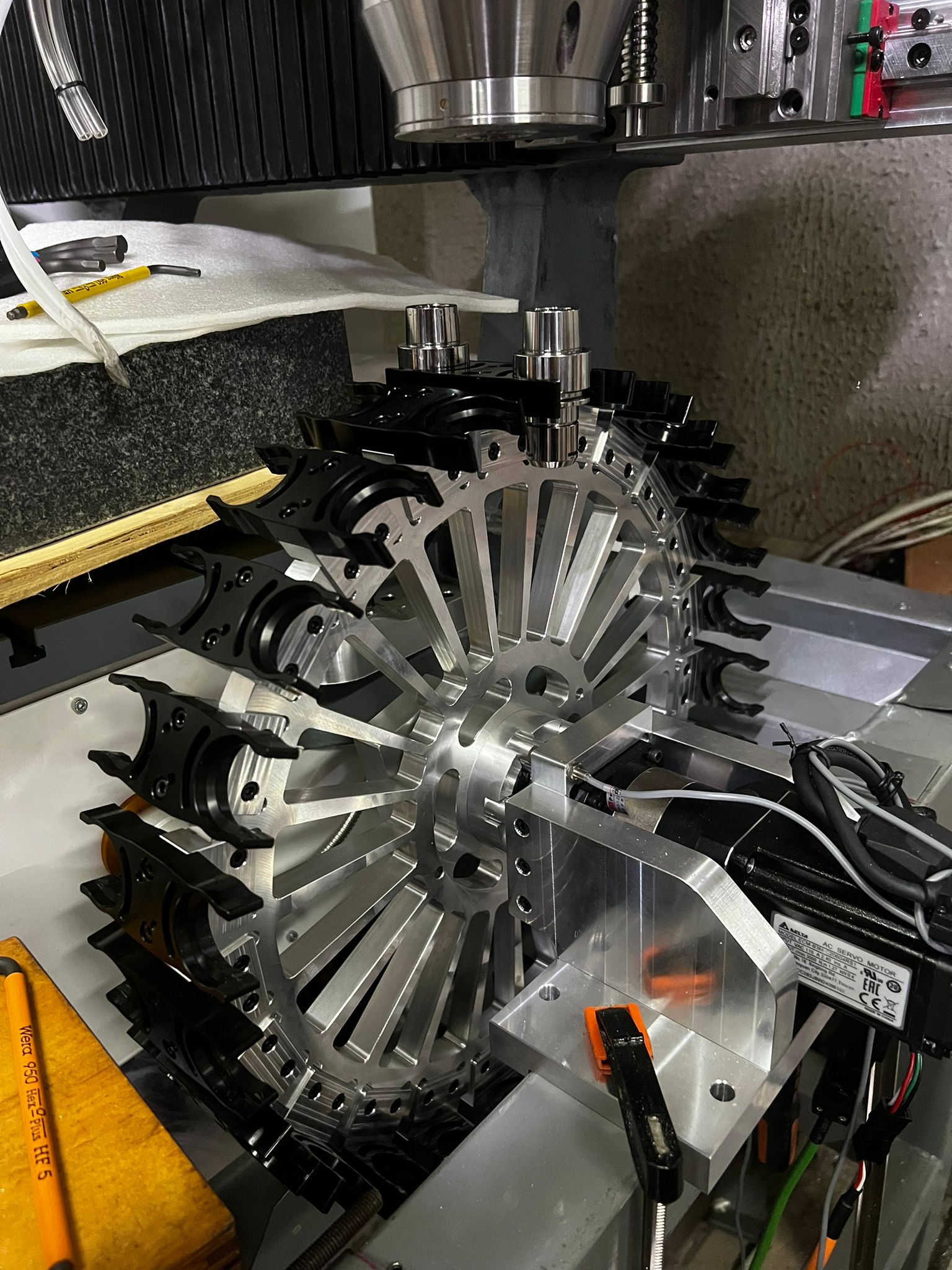
Ma ka laʻana ma lalo nei, Hoʻohana ʻia kahi pahu pahu servo 400W + PLF series. Ke nui loa ka inertia hana, hiki ke poino ke poo.
Pilikia 1: ʻAʻole hiki i ke kaʻa ke hoʻopuka i ka torque i koi ʻia i kahi manawa pōkole loa.
ʻO ka pilikia 2, ʻaʻole hiki i ka moʻo PLF ke kūpaʻa i ka inertia nui e haki ai nā mea hana.
3, ʻo ka hoʻomaʻemaʻe i ka wā o ka hana he nui loa. Haʻalulu maikaʻi ʻole ke kaʻa. ʻAʻohe ala e hiki ai i ke kūlana i kuhikuhi pololei ʻia.
Hoʻoholo:
1, hoʻololi i ka PLX090 reducer + 750W servo motor, hoʻonui i ka hoʻohaʻahaʻa ʻana. E hoʻonui i ka inertia.
2, hoʻohana i ka NT130 hollow rotary stage + 400W servo motor. ʻO ka hana maʻalahi a hoʻonui i ka pololei.
3, E hoʻohana i ka mīkini servo NT200 + 1000W. Me ka pilikia ole. Hoʻonui ʻia ka pololei a me ka torque. He hoʻoholo 'inikua loa. Manaʻo kā mākou mau ʻenekini i ke kolu o ka hopena.
Pūʻolo maʻiʻo
1 x pale pulu momi
1 x ka hu'ahu'a kūikawā no ka ha'alulu
1 x pahu pahu kūikawā a pahu lāʻau paha









